DTR410-S
DTR410-S 模塊是高度集成超低功耗半雙工微功率無線數據傳輸模塊,其嵌入高速單片機和高性能射頻芯片。創新的采用高效的循環交織糾檢錯編碼,抗
干擾和靈敏度都大大提高, DTR410-S 模塊提供了多個頻道的選擇,可在線修改串口速率,發射功率,射頻速率等各種參數。DTR410-S 模塊可在 2.1-3.6V 電壓范圍
內工作,在接收狀態僅僅消耗 3.2mA ,有四種工作模式。在 1SEC 周期輪詢喚醒醒省電模式 (Polling mode) 下,接收僅僅消耗不到 20uA, 一節 3.6V/3.6A 時的鋰亞電池可工作 10 年以上。
應用:
無線傳感器
家庭自動化
無線抄表
自動化數據采集
工業遙控、遙測
POS系統,資產管理
樓宇小區自動化與安防
機器人控制
車輛管理
氣象,遙感
特點:
? 700米傳輸距離(1000bps)
? 頻率406-410MHz,或430-437MHz.
? 多頻道可設。
? FSK的調制方式
? 高效的循環交織糾錯編碼
? 四種工作模式。
? 待機電流1.5uA。
? 超大的雙256bytes數據緩沖區
? 超低功耗
? 內置watchdog
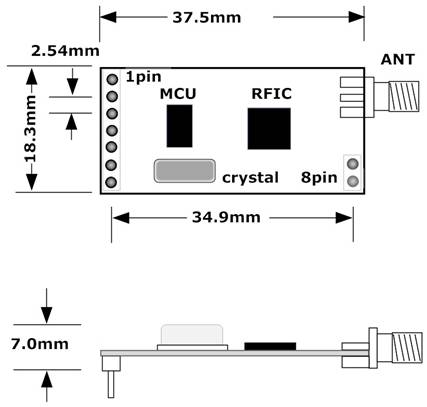
DTR410-S模塊是新一代的多通道嵌入式無線數傳模塊,其可設置眾多的頻道,步進精度為 1Khz ,發射功率高達20mW,而仍然具有較低的功耗,體積37.5mm x 18.3mm x 7.0mm ,非常方便客戶嵌入系統之內。
DTR410-S 模塊創新的采用了高效的循環交織糾檢錯編碼,最大可以糾24bits 連續突發錯誤,其編碼增益高達近 3dBm ,糾錯能力和編碼效率均達到業內的領先水平,遠遠高與一般的前向糾錯編碼,抗突發干擾和靈敏度都較大的改善。同時編碼也包含可靠檢錯能力,能夠自動濾除錯誤及虛假信息,真正實現了透明的連接。所以 DTR410-S 模塊特別適合與在工業領域等強干擾的惡劣環境中使用。
DTR410-S 模塊內設256bytes 大容量緩沖區,在緩沖區為空的狀態下,用戶可以1 次傳輸256bytes 的數據,當設置空中波特率大于串口波特率時,可1次傳輸無限長度的數據,同時 APC230-43 模塊提供標準的UART/TTL 接口, 1200/2400/4800/9600/19200/38400/57600bps 七種速率,和三種接口校驗方式。 APC230-43 模塊外部接口采用透明數據傳輸傳輸方式,能適應標準或非標準的用戶協議,所收的數據就是所發的數據。設置模塊采用串口設置模塊參數,具有豐富便捷的軟件編程設置選項,包括
頻點,空中速率,以及串口速率,校驗方式,等都可設置,設置方式有二種方 式,一是通過本公司提供的設置軟件RF-Magic 利用PC 串口即可,二是動態在線設置,用戶通過置低設置腳( SET) ,用串口發命令動態修改,具體方法參見 DTR410-S 模塊的參數設置章節。
引腳定義
DTR410-S
模塊共有9個接腳,具體定義如下表:
DTR410-S
引腳定義
引腳
定義
說明
1
GND
地
0V
2
VCC
3.3V-5.5V
3
EN
電源使能端,≧1.6V或懸空使能,≦0.5V休眠。
4
RXD
URAT
輸入口,TTL電平。
5
TXD
URAT
輸出口,TTL電平。
6
AUX
UART
口的收發指示輸出,低接收,高輸出。
7
SET
參數設置,低有效
。
8
NC
空腳。
9
NC
空腳。
表一
DTR410-S
引腳定義表
產品尺寸
圖一 產品尺寸圖
工作模式與省電
典型的無線收發機編碼如下圖。
PREAMBLE
(
前導碼
)
SYNCWORD
(
同步碼
)
ID FIELD
(ID)
可選
DATA + FEC +CRC
(
數據
+
前向糾錯
+ CRC
檢錯
)
前導碼為
“1010”
交替碼,其作用是使目的接收機時鐘與發射機同步,正常模式下前導碼長度一般為
32bit
即可,如工作在省電模式時序下,前導碼還有喚醒接收機的功能,此時發射機必須發送較長的前導碼將省電模式下的接收機喚醒進入正常的工作狀態。如設置接收機
1
秒鐘喚醒一次,那么接收機每間隔
1
秒鐘喚醒一次搜索前導碼
(tw)
,持續長度一般為
16bit
。而發射機首先發射
1
秒以上的前導碼再發射后面得同步碼等,這意味著接收機在喚醒的周期,只要信道中發現前導碼,在正常情況下都能夠可成功檢測到并喚醒接收,示意圖見圖五。
DTR410-S
有四種工作模式,見表二,這四種工作模式是利用
SET_A
和
SET_B
轉換的,四種模式均可以相互轉換。
SET_A
SET_B
工作模式
工作狀態
0
0
正常模式
(
模式
1)
(
模式1)
串口打開,模塊處于持續接收狀態,當串口有
數據輸入時,置低AUX,并切換到發射狀態,發送前導碼長度為32bit和同步碼等,數據發送結束后重新置高AUX腳并重新轉入持續接收狀態。
處于該模式下模塊發送數據時并沒有發送較
長的前導碼,所以要求接收方必須處于模式1或模式2,即持續接收狀態。如模塊從當前信道中接收到數據后,經過解交織糾錯檢錯確認數據無誤時,置低AUX并立刻從串口輸出數據,發送結束后重新置高AUX.
0
0
喚醒模式
(
模式
2)
串口打開,模塊處于持續接收狀態,當串口有
數據輸入時,置低AUX,并切換到發射狀態發送數
據,發送前導碼長度為一個喚醒周期(如1秒)加
32bit
和同步碼等,. 數據發送結束后重新置高AUX腳并重新轉入持續接收狀態。處于該模式下模塊發送數據時發送了較長的前導碼,所以接收方處于模式1,模式2或模式3均能夠接收到數據。
如模塊從當前信道中接收到數據后,經過解交
織糾錯檢錯確認數據無誤時,置低AUX并立刻從
串口輸出數據,發送結束后重新置高AUX.該模式的發射示意圖見圖五。
1
0
省電模式
(
模式3)
串口處于關閉狀態,接收機在一個喚醒周期(如
1
秒)后打開并搜索信道中是否有前導碼,如沒有則立刻休眠狀態等待下一個喚醒周期再被喚醒,如有前導碼則繼續于接收狀態并監控前導碼并等待同步碼到來后,將數據接收收下來。經過解交織糾錯檢錯確認數據無誤時,置低AUX以喚醒下位機,等待5ms后打開串口并輸出數據。
串口輸出結束后,關閉串口,置高AUX,如模
式設置沒有改變則再次進入立刻休眠狀態等待下一個喚醒周期。
該模式的接收示意圖見圖五
1
1
休眠模式
(
模式4)
串口處于關閉狀態,模塊處于休眠狀態。這種
模式下,模塊的射頻電路,CPU主時鐘與外設均被關閉,耗電僅僅約1.5uA。模塊的設置是休眠模式完成的,過程是見模塊設置的章節
表二:四種工作模式說明
圖二:發射處于模式2狀態,接收處于模式3狀態示意圖
需注意的是模塊在接收或發送過程中,即使設置SET_A和SET_B至模式3或
4
,模塊也要將接收或發送過程執行完畢在進入省電模式或休眠模式,模塊的活
動狀態可以通過監控AUX數據輸入輸出指示腳判斷,模塊在接收或發送過程中
AUX
將被模塊置低。模塊與下位機的連接圖見圖三。SET_A和SET_B雖然有弱上拉,但為了在正常工作時不能懸空,必須有明確的電平,否則可能造成模塊工作不穩定。
圖三:模塊與下位機的連接圖
在電池供電的電路中,正常可將從模塊(如水氣表)設置在模式3上,當主模塊(如采集器或收抄機)在模式2下發送數據,從模塊喚醒后接收數據,完成后利用AUX腳將下位機MCU喚醒,再將數據輸出,MCU接收到數據后,可將從模塊切換至模式1,應答主模塊.如主模塊收到應答后也可被切換至模式1,這時主從模塊均處于正常模式下,可以實現高速數據傳輸。如主模塊收到應答后,后續無數據交換可將從機再次切換至模式3處于省電模式下,等待下一次的喚醒,而主模塊可以切換至模式4休眠狀態。
因為省電是通過周期性喚醒休眠再喚醒實現的,所以在省電模式下的功耗與喚醒周期和每次喚醒搜索前導碼的時間(tw),以及休眠的靜態功耗有關。喚醒周期用戶可以在線設置范圍是50ms至5s. 每次搜索前導碼時間與射頻傳輸的速率有關,射頻傳輸的速率也是可設的,在10Kbps速率的速率下喚醒搜索前導碼時間平均約為4.5ms.
在省電模式下電池的使用壽命可以通過以下公式算出:
使用壽命 =
電池容量Mah/(搜索前導碼時間/(喚醒周期+搜索前導碼時間))*接收電流+休眠電流
例如:電池是
3.6V/3.6A ER18505
鋰亞電池,DTR410-S接收電流為3.2mA,休
眠電流1.5uA.射頻傳輸速率10Kbps,喚醒周期為1SEC,
電池使用壽命是:
=3600Mah/(4.5ms/(1000ms+4.5ms))*3.2mA+
0.0015mA
≈ 227337H ≈ (25.95年)
考慮到電池的自放電,不同電流下的容量差異,溫度以及客戶端MCU的休眠功耗和每月幾次的使用,1節
3.6V/3.6A
ER18505
鋰亞電池正常情況下有超過10年的使用壽命。省電模式的工作方式非常適合水氣熱表,集裝箱信息管理,數據采集系統等使用不是太頻繁但要求用電池長期工作的場合。
DTR410-S
模塊的參數設置
:
DTR410-S
模塊使用相當的靈活,可以根據用戶的需求設置不同的選項。
DTR410-S
模塊的參數設置說明
設置
選相
默認
串口速率(Series Rate)
1200
,2400,4800,9600,19200,38400,57600bps
9600bps
串口效驗(Series Parity)
Disable
,
Even
Parity(
偶效驗),Odd Parity(奇效驗)
Disable
收發頻率(RF Frequency)
418MHz-455MHz(1K
步進)
434
MHz
空中速率(Series Rate)
2400,4800,9600,19200bps
9600bps
輸出功率(RF Power)
0-9(9
為20mw)
9(20mw)
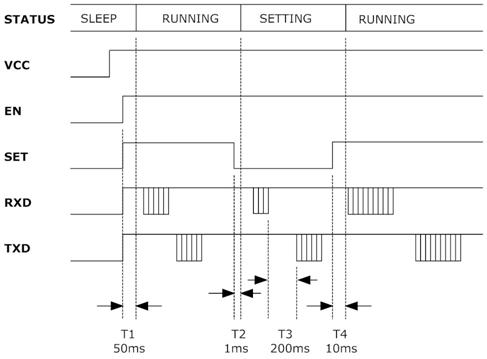
圖三 在線修改設置時序圖
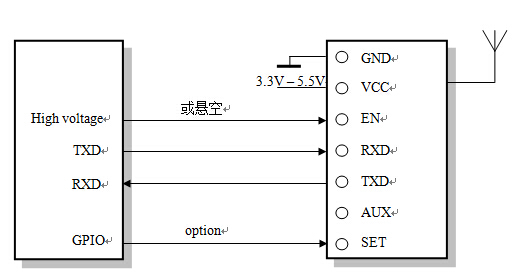
模塊與終端設備的連接
圖四 模塊與終端設備的連接(UART/TTL電平)接線圖
DTR410-S
技術指標:
DTR410-S
技術指標
418MHz to
455MHz (1KHz
步進)
調制方式
GFSK
頻率頻偏
67KHz
發射功率
10mw (10
級可調)
接收靈敏度
-113dBm@1200bps
空中傳輸速率
2400 - 9600bps
接口速率
1200 - 57600bps
接口效驗方式
8E1/8N1/8O1
接口緩沖空間
256bytes
工作濕度
10%
~90%(無冷凝)
工作溫度
-30
℃
- 85
℃
電源
3.4 –
5.5V (
±50mV 紋波)
發射電流
26mA@10mW, 17mA@1mW (
典型值)
接收電流
3.0mA@1Kbps,3.2mA@10Kbps,(
典型值),最大3.5mA。
休眠電流
1.5uA(
典型值),最大2.5uA
傳輸距離
600
米傳輸距離 (1200bps開闊地可視距離)
尺寸
37.5mm x 18.3mm x 7.0mm
表三
DTR410-S
技術指標
DTR410-S
模塊的組網應用
DTR410-S 的通信信道是半雙工的,可以完成一點對一點,一點對多點的通訊。這二種方式首先需要設1個主站,其余為從站,所有站點都必須設置一
個唯一的地址。通信的協調由主站控制,主站采用帶地址碼的數據幀發送數據 或命令,所有從站全部都接收,并將接收到的地址碼與本機地址碼比較,地址
不同則將數據丟掉,不做響應,若地址碼相同,則將接收的數據傳送出去。組網必須保證在任何一個瞬間,同一個頻點通信網中只有一個電臺處于發送狀態,
以免相互干擾。 DTR410-S 可以設置多個頻道,所以可以在一個區域實現多個網絡并存。
DTR410-S
模塊的注意的問題
考慮到空中傳輸的復雜性,無線數據傳輸方式固有的一些特點,應考慮以下幾個問題。
1
)無線通信中數據的延遲
由于無線通信發射端是從終端設備接收到一定數量的數據后,或等待一定的
時間沒有新的數據才開始發射,無線通信發射端到無線通信接收端存在著幾十到
幾百毫秒延遲(具體延遲是由串口速率,空中速率以及數據包的大小決定),另外
從無線通信接收端到終端設備也需要一定的時間,但同樣的條件下延遲時間是固
定的。
2
)數據流量的控制
DTR410-S 模塊雖然有256bytes大容量緩沖區,但若串口速率大于等于空中
速率,則存在數據流量的問題,可能會出現數據溢出而導致的數據丟失的現象。
在這種情況下,終端設備要保證串口平均速率不大于60%空中速率,如串口速率
為9600bps,空中速率為4800bps, 終端設備每次向串口發送100字節,那么終端
設備每次向串口發送的時間約104ms,(104ms/0.6)*(9600/4800)=347ms,所以終
端設備每次向串口發送100字節每次間隔不小于347ms,以上問題則不會出現。
3
)差錯控制
DTR410-S 模塊具有較強的抗干擾能力,在編碼已經包含了強大的糾檢錯能
力。但在極端惡劣的條件下或接收地的場強已處于 DTR410-S 模塊接收的臨界狀
態,難免出現接收不到或丟包的狀況。此時客戶可增加對系統的鏈路層協議的開
發,如增加類似TCP/IP中滑動窗口及丟包重發等功能,可大大提高無線網絡的使
用可靠性和靈活性。
4)
天線的選擇
天線是通信系統的重要組成部分,其性能的好壞直接影響通信系統的指標,
用戶在選擇天線時必須首先注重其性能。一般有兩個方面,第一選擇天線類型; 第二選擇天線的電氣性能。選擇天線類型的意義是:所選天線的方向圖是否符合系統設計中電波覆蓋的要求;選擇天線電氣性能的要求是:選擇天線的頻率帶寬、增益、額定功率等電氣指標是否符合系統設計要求。因此,用戶在選擇天線時最好向廠家聯系咨詢, DTR410-S 要求的天線阻抗為 50 歐姆。
常見問題解答:
常見問題解答
設備之間不能正常通訊
1
.
兩端的通訊協議不一致,如:
波特率,校驗不一致。
2
.
兩端的頻點,空中
波特率
不一致。
3
.
不是同一系列產品。
4
.電源連接不正常。
5
、模塊已損壞。
6
.模塊EN腳設置錯誤
7
.通訊距離超過范圍,或天線接觸不良。
傳輸距離近
1
.電壓超過范圍
2
.電源紋波過大。
3
.天線接觸不良或天線類型不對。
4
.天線過與靠近金屬表面或模塊接地面積太小。
5
.接收環境惡劣,如
建筑物密集,有強干擾源。
6
.有同頻干擾。
接收有錯誤數據
1
.接口設置不當。
2
.接口接觸不良。
3
.接口電纜線過長。
4
.
波特率設置不對
。
深圳市科靈通科技有限公司
TEL:86-755-83409318 83879515
FAX:86-755-83490476
Email:83409318@163.com
在線客服1:
在線客服2:
在線客服3:
服務時間:
9:00-18:00(工作日)

